“Steelbug”
“Steelbug” ist im Grunde mein erster selbstgebauter Roboter. Ursprünglich wollte ich einen Roboter bauen, der als Vorlage für Einsteiger dienen kann. Diesen Zweck erfüllt er im Grunde auch, allerdings habe ich das Gehäuse etwas aufwändiger gestaltet.
Wenn Steelbug kein Hindernis wahrnimmt, bewegt er sich geradeaus und die grüne LED blinkt gleichmäßig. Sobald er sich einem Objekt nähert gibt er hektische Signale mit der roten LED und driftet per Zufallsbewegung nach rechts oder links. (Mit der aktuellen Programmierung.)
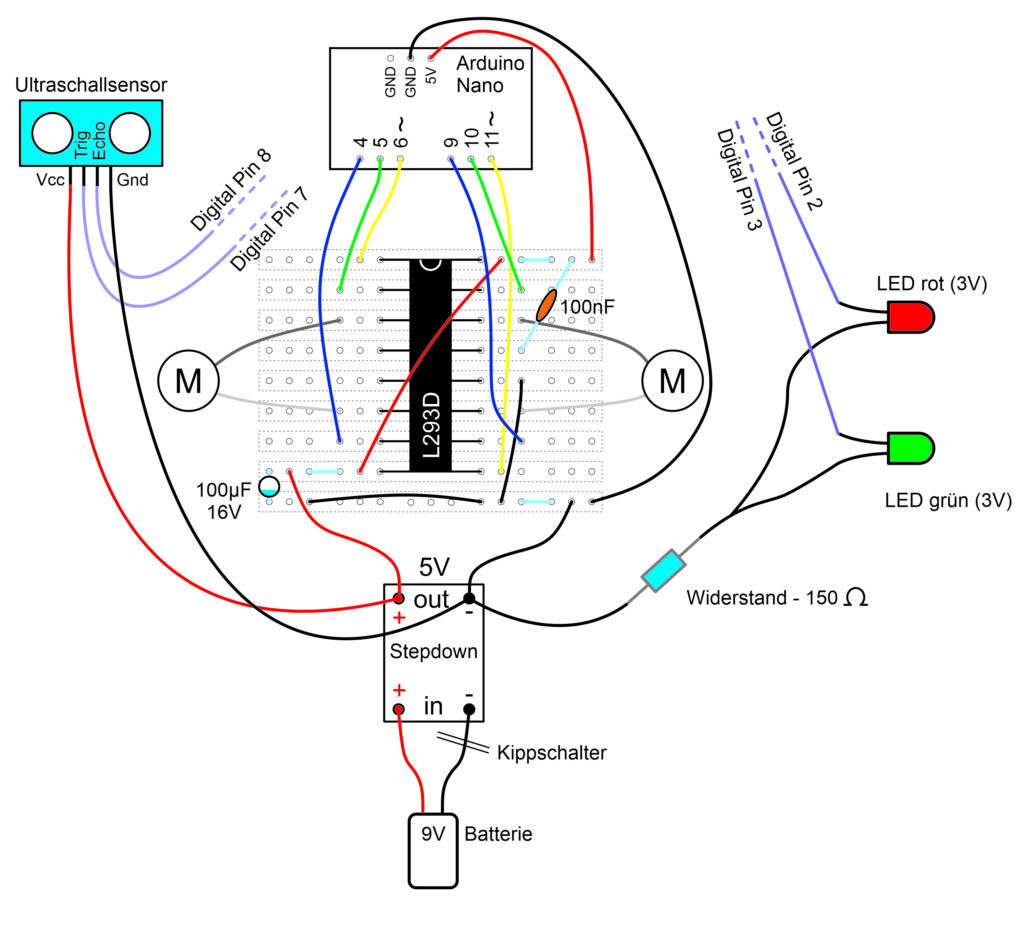
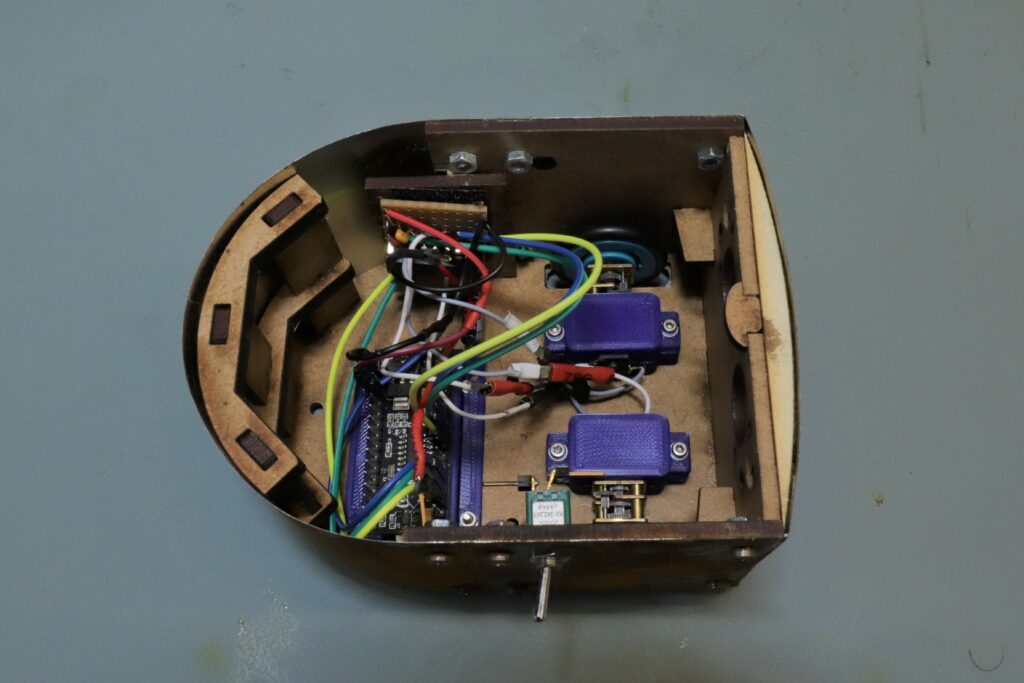
Die Abbildung oben zeigt eine schematische Darstellung der Elektronik (Betonung auf schematisch). Das zentrale Nervensystem bildet ein Arduino-Nano. Bei den Motoren handelt es sich um Getriebemotoren. Da sie sich sowohl vorwärts als auch rückwärts drehen sollen, kommt ein H-Brücken-IC (L293D) zum Einsatz. Die Enable-Pins des IC sind mit PWM-fähigen Pins des Arduinos verbunden (gelbe Kabel). Dadurch lässt sich die Drehzahl regulieren.
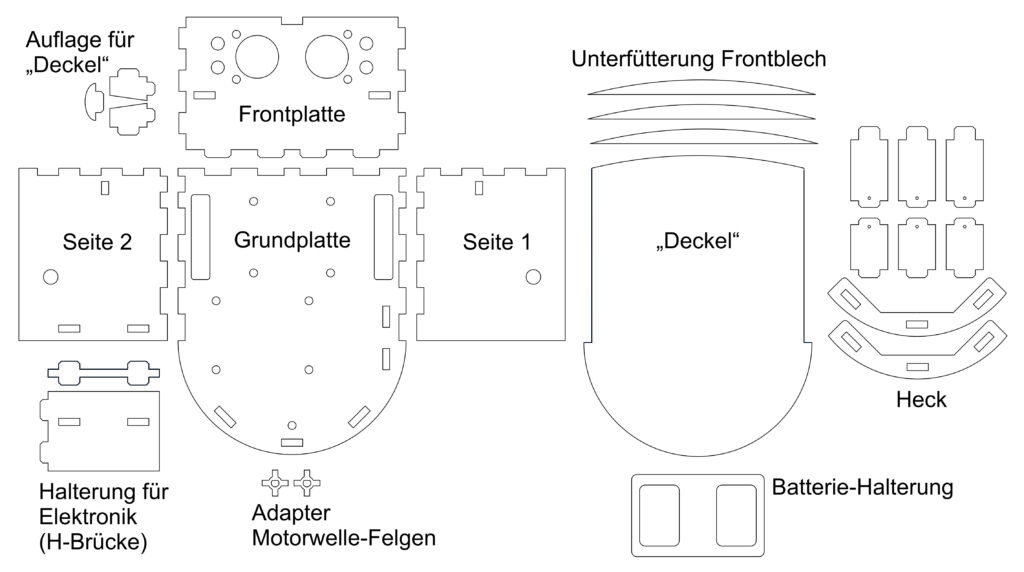
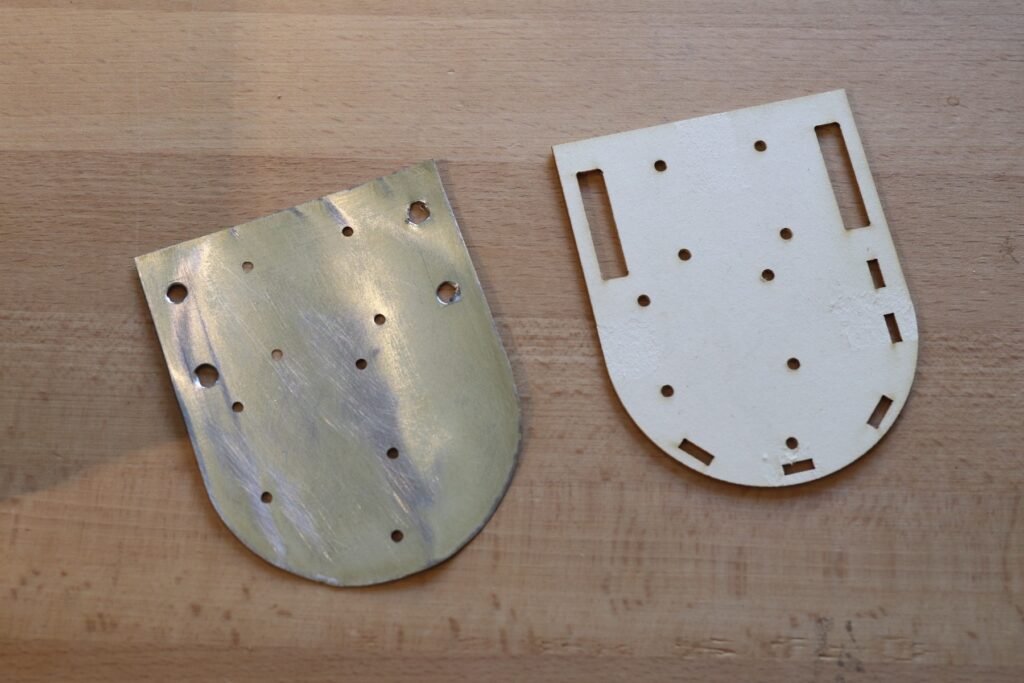
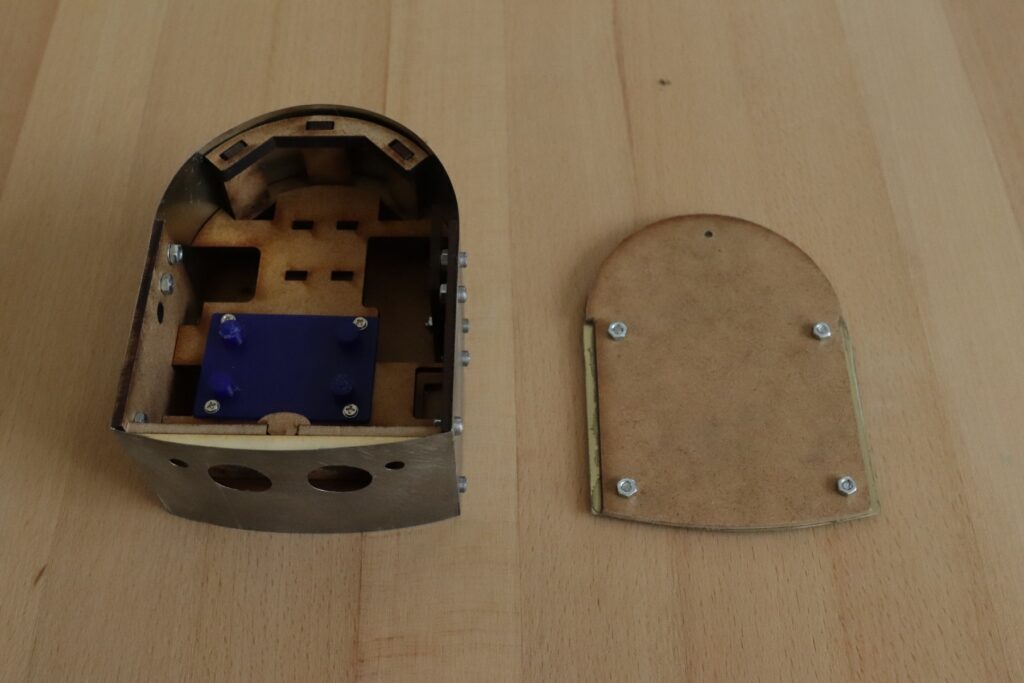
Dies sind die Bauteile, welche das “Skelett” des Roboters bilden. Sie wurden mit dem Lasercutter aus hochdichter Faserplatte (HDF) geschnitten. Die Stärke liegt bei 3mm, mit Ausnahme der beiden bogenförmigen Teile des Hecks, die aus 5mm starkem HDF bestehen. Der Lasercutter lässt sich mit 2D-Vektorzeichnungen ansteuern. Aus meiner Sicht ist das 2D-Vektorzeichnen ein guter Einstieg ins technische Konstruieren. Inkscape ist hierfür gut geeignet und außerdem Freeware.

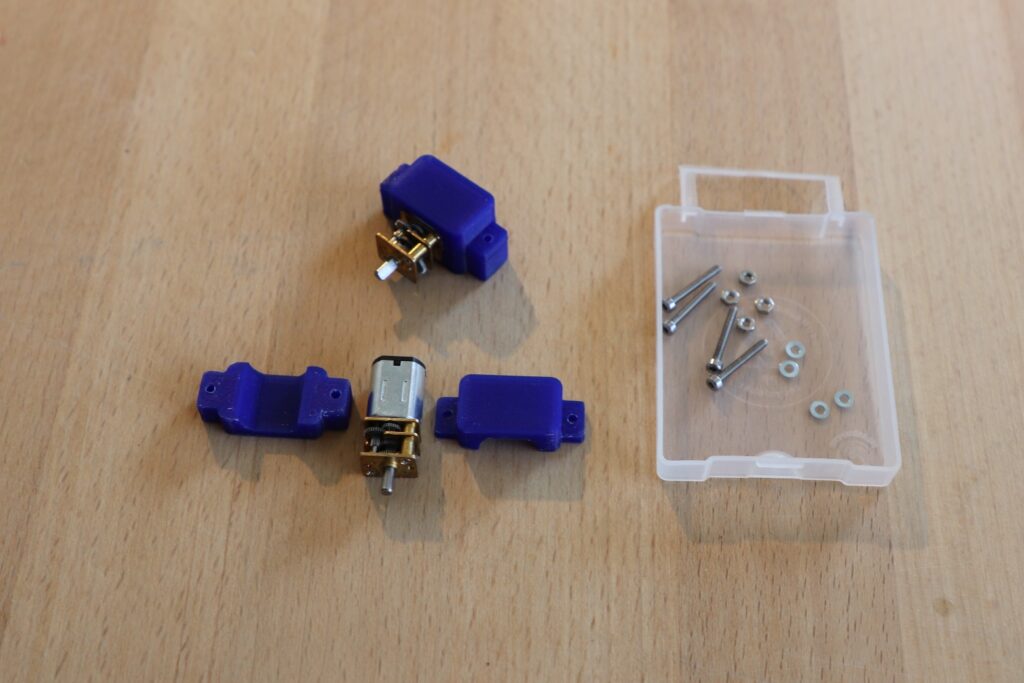
Die beiden Räder werden jeweils von einem 6V-Getriebemotor mit einer Untersetzung von 1/1000 angetrieben. Bezeichnung: Sol Expert G1000 Micro-Getriebe. Die Motorhalterungen kommen aus dem 3D-Drucker. Sie werden mit Schrauben der Größe M2 auf der Grundplatte befestigt.

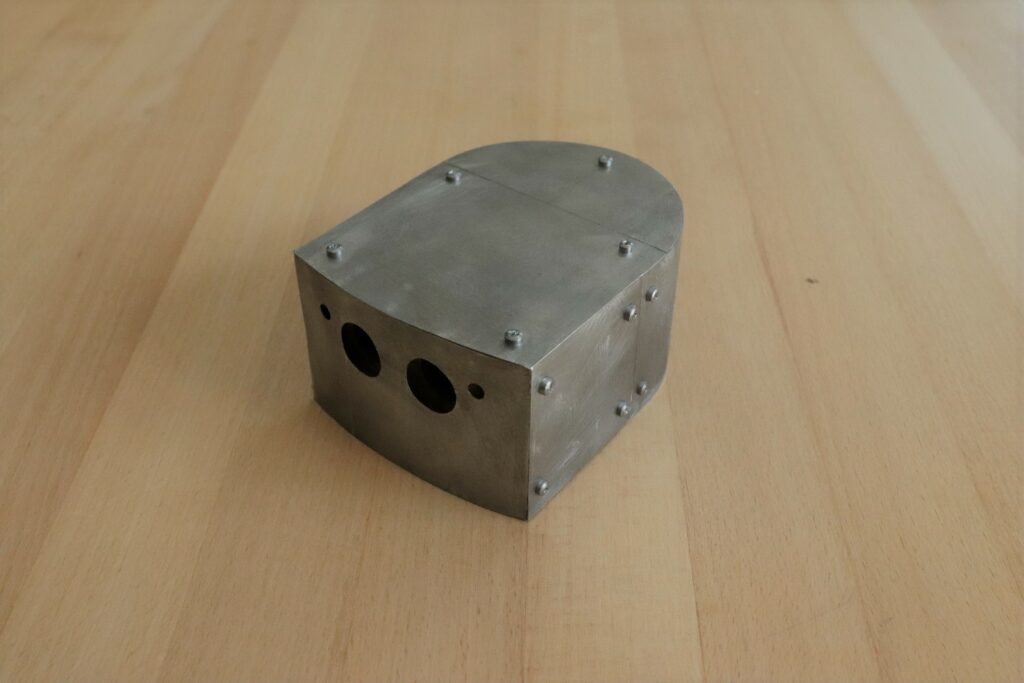
Der Roboter soll eine Außenhaut aus verrostetem Blech bekommen. Das Blech stammt von etwas stabileren 0,5 Liter-Getränkedosen. (Das Blech der meisten gängigen Dosen ist mittlerweile sehr dünn und erinnert nach dem Aufschneiden eher einer Metallfolie.)




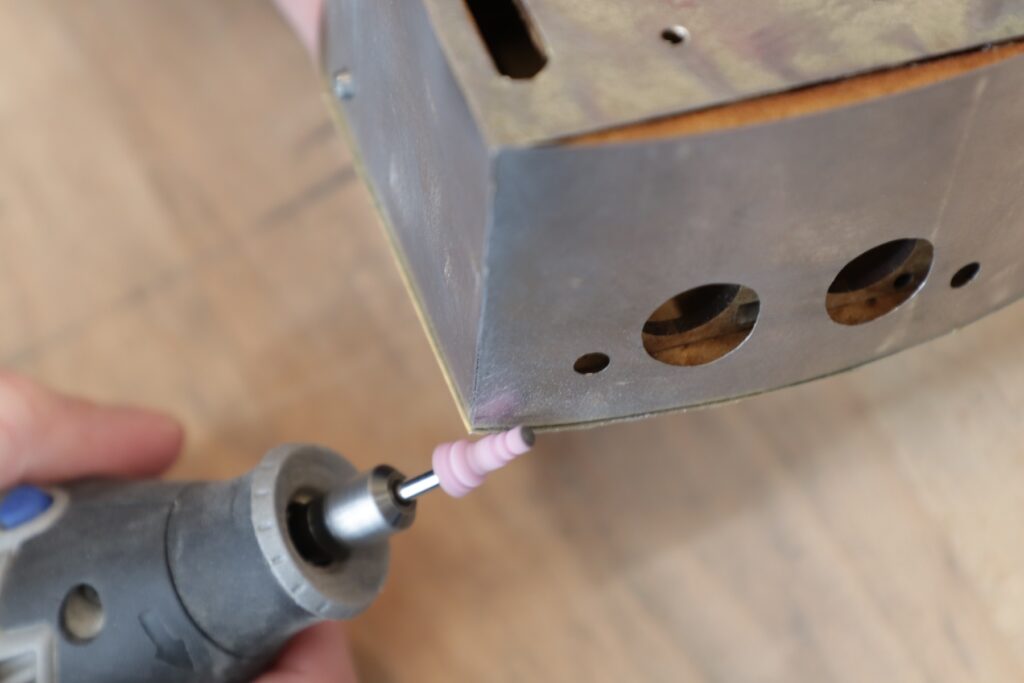
Tatsächlich war die Blechbearbeitung der aufwändigste Arbeitsgang. Gerade Schnitte konnte ich gut an unserer Abkantbank machen. Ansonsten halfen Dremel, Schlüsselfeile, Blechschere und Geduld.
Das hintere Blechsegment sollte abnehmbar bleiben, um Programme auf den Arduino laden zu können, ohne diesen ausbauen zu müssen. Es ist also mit vier Maschinenschrauben an den HDF-Seitenteilen befestigt.
Da ich keine M2er-Schrauben mehr hatte und mir die M3-Schraubenköpfe für den kleinen Roboter zu groß erschienen, habe ich sie in unserer Feindrehmaschine in Durchmesser und Höhe angepasst.




Die Oxidation durch die Chemikalie lässt sich eigentlich nicht steuern. Die beiden Bilder zeigen den Roboter ca. 24 Stunden nach der ersten Benetzung. Die Oxidation setzte sich von da an nicht wirklich fort. Einige Stellen habe ich zu einem späteren Zeitpunkt nochmal nachbehandelt. Auftragen lässt sich die Flüssigkeit mit einem Pinsel.

Über den Autor
Andreas
Ich habe lange Zeit in den Schülerlaboren der experimenta gearbeitet und bin 2019 in den Maker Space gewechselt, als dieser eröffnet wurde.