Mini-Roboter “Crawler”
Alle Dateien hier zum download: https://www.thingiverse.com/thing:3731351/files
Für einen Wettbewerb 2018 von Conrad Electronics haben wir bei Code for Heilbronn e.V. einen Roboter entwickelt. Der Roboter wurde entworfen um möglichst einfach gebaut ein möglichst breites Band an Geländeformen bewältigen zu können.
Für die Geländegängigkeit sind vor allem die speziell geformten Räder verantwortlich. In eine Richtung läuft das Rad verhältnismäßig ruhig und der Roboter kann sich schnell vorwärts bewegen. In die andere Richtung kann der Roboter sich im strukturierten Oberflächen verhaken und auch Steigungen gut überwinden.

Die Räder sind in Fusion360 erstellt und dann aus TPU gedruckt. TPU ist flexibles und abriebsfest und damit sehr gut geeignet.
Der Body besteht aus gelasertem MDF. Im Design sind vier äußere Schächte und eine mittlere große Bucht vorgesehen. In der Mitte ist der Akku und der Lagesensor untergebracht. Auf zwei der äußeren Schächte befinden sich der Controller und der StepDown für die Stromversorgung. Betrieben wird der Roboter mit einem 2S Lithium Polymer Akku. Der Stepdown ist ein LM2596 und als Microcontroller arbeitet ein Wemos D1 Mini (ESP8266).
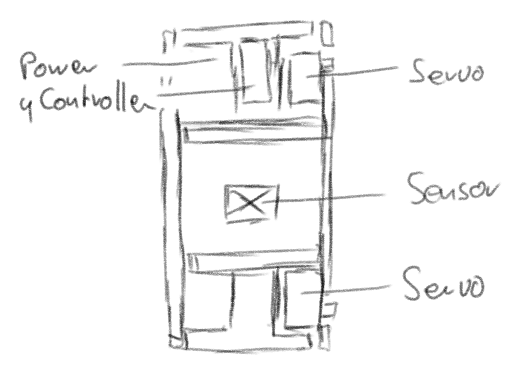
Angetrieben wird alles von vier Continous Rotation Servos. Im Roboter können dabei HSR-1425CR oder baugleiche Servos eingesetzt werden. Jeder Servo wird dabei vom Controller separat angesteuert. Dadurch und durch die Form der Räder ergibt sich ein eher watschelndes Laufbild des Roboters.
Über den Autor
Jonathan
Ich bin joni - Festangestellt im Maker Space - kümmere mich um alle Fragen, vor allem aber Programmierung, Technik, 3D Druck, Rapid Prototyping - außerdem noch gerne in der Holzwerkstatt unterwegs. Im Maker Space findest du mich überall und nirgends. Wenn ich privat da bin sitze ich meistens an einem der Projekttische am Laptop.